Der Experte für maßgeschneiderte Automationslösungen
WFL und FRAI stehen mit ihren maßgeschneiderten Automationslösungen von Komplettbearbeitungsmaschinen für höchste Kompetenz. Verbaut werden nur die hochwertigsten Komponenten. Bei der neuen Roboterzelle sorgt der Kuka-Roboter KR FORTEC mit seiner schlankeren Bauweise, der hohen Präzision und Langlebigkeit für mehr Produktivität und untermauert so den Qualitätsanspruch von WFL und FRAI. Entscheidend ist hier nicht nur die Automationsanlage, sondern das Gesamtpaket aus einer Hand.
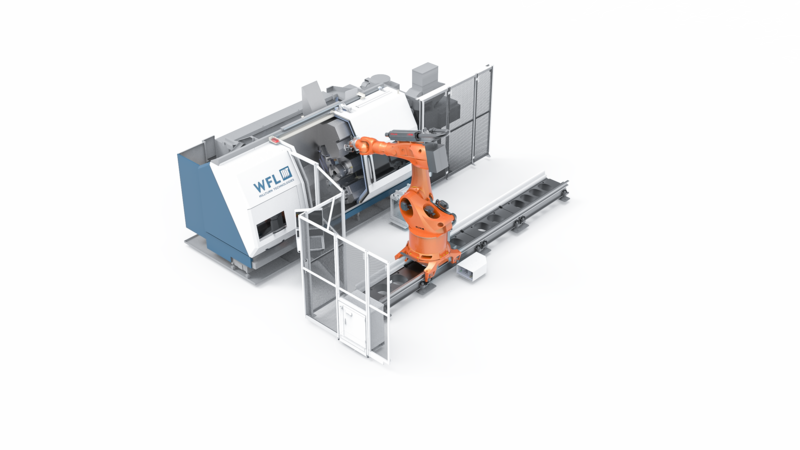
Ein besonders spannendes Automatisierungsprojekt betrifft eine M35-G MILLTURN mit Roboterzelle. Diese Zelle ist mit einem auf einer Linearachse verfahrenden Kuka Schwerlastroboter der FORTEC Serie, Paletten-Abstellplätzen und einem auf einer Linearachse verfahrenden Kamerasystem mit Fremdlichtabschottung ausgestattet. Des Weiteren sind ein automatisches Greifer-Wechselsystem sowie eine Umgreifstation für Futterund Wellenteile darin zu finden.
Die Rohteile werden über beladene Paletten manuell in den Arbeitsraum des Roboters gebracht. Die Position der Rohteile auf den Paletten wird durch eine Kamera erkannt und über eine spezielle Software in die Greifposition des Roboters umgerechnet. Der Roboter ist mit einem automatischen Greifer-Wechselsystem ausgestattet, um die Greifer automatisch zwischen Futterteil und Wellenteil umrüsten zu können.
Nach der Aufnahme eines Rohteils von der Palette werden bei Wellenteilen Anwesenheit und Position des Rohteils im Greifer mittels Lichtschranke kontrolliert. Bei Futterteilen erfolgt die Werkstückanwesenheitskontrolle durch Überwachen der Greiferposition. Die Hubüberwachung der Greifbacken bzw. die Anwesenheitskontrolle auf der Zwischenablage stellt sicher, dass ein Werkstück aufgenommen wurde.
Automationsablauf für Wellenteile (Einzelgreifer-Prinzip):
Nach der Aufnahme des Rohteils von der Palette wird mittels eines Laserlichtschrankens seine genaue Position im Greifer ermittelt. Anschließend wird durch Austasten (Fahren gegen eine gefederte, positionsüberwachte Spitze) der beiden unterschiedlich tiefen Zentrierbohrungen des Rohteils auch noch seine Ausrichtung ermittelt. Das Rohteil wird danach Positions- und Lagerichtig auf die Zwischenablage neben der Maschinentüröffnung abgelegt.
Danach fährt der Roboter mit leerem Greifer in Warteposition vor die Maschinentür. Nach Erhalt des Signals zur Teileentnahme entnimmt er das Fertigteil aus der Maschine und legt es ebenfalls auf die Zwischenablage vor der Maschine. Nun nimmt er das zuvor vorbereitete Rohteil auf und belädt die Maschine. Anschließend bringt der Roboter das Fertigteil von der Zwischenablage auf die Fertigteilpalette.
Automationsablauf für Futterteile (Doppelgreifer-Prinzip):
Der Roboter holt mit einem Greifer ein Rohteil aus der Palette und legt es auf die Zwischenablage. Anschließend führt der Roboter einen automatischen Greiferwechsel durch. Mit dem Zentrischgreifer für Rohteile nimmt er das zuvor abgelegte Rohteil von der Zwischenablage wieder auf und führt in der Maschine den Teilewechsel durch. Nach der Bearbeitung des Bauteils in der Maschine öffnet sich die Tür und der Roboter kann das Fertigteil aus der Gegenspindel entnehmen. Während die Maschine das Spannmittel reinigt und das Halbfertigteil von der Hauptspindel in die Gegenspindel übergibt, bringt der Roboter den Greifer in Position und im Anschluss das neue Rohteil in das linke Spannmittel der Maschine. Das Fertigteil wird auf der Fertigteilpalette abgelegt. Im Anschluss befördert der Roboter das nächste Rohteil von der Rohteilpalette auf die Zwischenablage und nimmt es von dort mit der Rohteilseite des Greifers auf.
- Für Futterteile ist ein Greifer mit verstellbaren Backen vorgesehen sowie ein Magnetgreifer zur Rohteilentnahme aus der Rohteilpalette.
- Als Paletten für die Fertigteile kommen kundenseitige Werkstückträger zum Einsatz, die zum Teil bei der nachfolgenden Bearbeitungsmaschine weiter verwendet werden können.
- Die Position der Rohteile auf den Paletten wird durch eine Kamera erkannt und über eine spezielle Software in die Greifposition des Roboters umgerechnet.